

Researchers at the University of Cincinnati are developing a drone with flapping wings that can locate and hover around a moving light like a moth to a flame.
The researchers believe the unusual drones could provide a highly efficient way of flying that could be scaled down for use in covert surveillance.
Moths can hover in place or even fly backwards and automatically make fine adjustments to compensate for wind or obstacles to remain stationary or follow a moving object. The University of Cincinnati (UC) moth-like drone makes fine adjustments in a similar way to maintain a desired attitude and distance from a light, even when the light moves.
Extremum seeking control advantages
University of Cincinnati (UC) College of Engineering and Applied Science Assistant Professor Sameh Eisa, who is heading up the research, said “The reason we’re interested is size. It’s a more optimal design. These small robots would have to fly like a moth.”
The research, which was published in the journal Physical Review E this month, theorizes that hovering insects can fly so adroitly because they employ the equivalent of extremum-seeking feedback systems.
Extremum seeking control is a model-free, real-time adaptive control algorithm that can be used to adapt parameters when the system dynamics are unknown.
These systems allow for drone navigation in real-time without complex calculations, global-positioning equipment or AI by simply making constant adjustments to control inputs such as the number of flaps per second.
Flapper drones control roll, pitch and yaw by flapping the wings independently. But this independent flapping is too fast for the naked eye to observe.
The drone simultaneously measures the performance of whatever function it is programmed to optimize, like finding a light source, to correct its course in a constant feedback loop that allows for remarkably consistent and stable flight.
“Moths make it look easy,” Eisa said. “The reason we use extremum-seeking techniques is because they seem to be biologically plausible.”
Lead author of the study Ahmed Elgohary said, “Our simulations show that extremum-seeking control can naturally reproduce the stable hovering behavior seen in insects – without AI or complex models,” said Elgohary, the study’s lead author. “It’s a simple feedback, model-free and real-time principle that could explain how these small creatures achieve such agility with very limited brainpower.”
Flight tests
During testing, the drone was able to match the subtle back-and-forth sway of each of the hovering insects it was designed to mimic: moths, bumblebees, dragonflies, hoverflies, craneflies along with hummingbirds.
Elgohary and UC graduate student Rohan Palanikumar used a remote controller to demonstrate how the flapper drone flies in Eisa’s flight lab, which is surrounded by soft netting to protect both drones and people from inadvertent crashes. The drone has four wings made of wire and fabric.
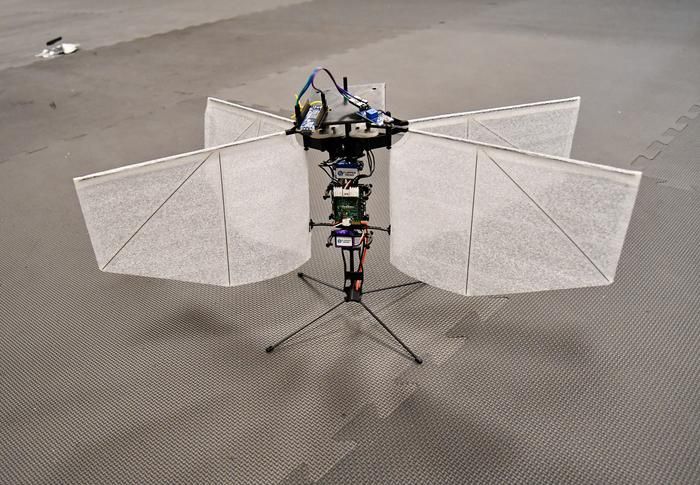
(Image: UC / Michael Miller)
Controlling the sensitive drone manually was found to be much harder and less reliable than using its own extremum-seeking system, Elgohary said. But once activated, the flapper drone lifted into the air and hovered in place, if a bit wobbly. This wobble is intentional and provides the perturbations the system needs to evaluate changes in performance so it can constantly course correct to optimize its flight.
Future research
Eisa said the research could have future applications in drones and improve the understanding of how tiny insects manage their aerobatics with brains the size of a grain of pollen.
“It could change a lot of things about biophysics. If it is the case that hovering insects like moths use the equivalent of our extremum-seeking feedback, it probably evolved in other creatures as well,” Eisa said.
Eisa’s Modeling, Dynamics and Control Lab at UC explores animal-inspired engineering. Previous projects include drones that could harness the power of dynamic soaring to cover vast distances more efficiently, much like an albatross.
This article was originally published by the University of Cincinnati


