


Despite being the hottest day of the summer in the UK, a very un-British 37˚C, the workshops of the Rolls-Royce University Technical Centre in Manufacturing and On-wing Technology at Nottingham University are full of young and talented engineers. They are working with the latest instrumentation, materials, robotics and control software to develop testing, inspection and repair systems for aircraft engines.
The one-year old building has excellent air conditioning, but the researchers inside the modern workshops are also motivated by genuine enthusiasm. These promising young engineers are developing ideas
with funding and tools from industry and government which will ultimately reduce downtime and increase the reliability of aircraft.
Dragos Axinte, director of the Rolls-Royce University Technical College (UTC) in Manufacturing and On-wing Technology at Nottingham University says, “We design and build everything here ourselves. We aren’t buying robots, we are developing them.”
The UTC at Nottingham University celebrates its 20th anniversary this year. Initially focused on manufacturing, research at the UTC has shifted in recent years to include the development of testing and inspection technologies. Axinte, a specialist in machine tools, sees the recent advances in robotics as presenting an opportunity to develop new platforms for machine tools.
To further this idea, around 15 of the 40 people in the Manufacturing and On-wing Technologies UTC are involved full time in robotics research. They typically develop projects to TRL 4, although some have advanced as far as TRL 6.
Blade damage
The UTC has several non-destructive testing and inspection systems in development which are used while an engine is still on an aircraft wing. The research projects combine probes, optics, machine tools and tele-operated controls in robotic systems to detect, diagnose and repair damage to the interior of jet engines and turbine blades. Several of the solutions being developed use an innovative snake-arm robot that is guided deep inside an engine to perform inspections and repair defects.

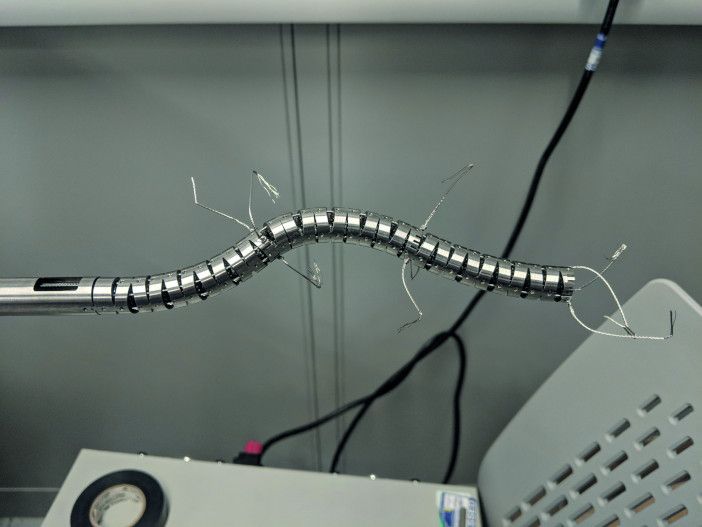
The snake-arm was developed over the past decade and uses a compliant-joint structure and multiple continuous sections that enable it to bend ± 90°. The snake-arm can be different widths and crucially has a hollow interior, through which different tools or instruments can be fitted. The design’s flexibility in terms of size and movement means it forms the basis of several projects, including a walking hexapod robot.
Boreblending
One of the first on-wing technology projects at the UTC was the Remote Inspection and Engine Repair (REINER). The project concluded last year and was funded by the UK’s Aerospace Technologies Institute and Rolls-Royce. Researchers at the UTC have developed a remotely-controlled robot that deploys non-destructive testing and repair probes using a snake arm.
The REINER robot can be used to repair a compressor blade in a jet engine. These blades can be damaged by ingested debris. Today, to carry out this repair an engineer has to travel to where the engine is, inspect the engine and then repair damaged blades using a technique known as boreblending, resulting in downtime and expense.
The robot developed by the REINER project is attached to the engine’s inspection port and a probe descends into the compressor. A stereo camera mounted on the end of the probe is moved using electric actuators and examines the damage. Software built into the probe measures the defect and the data is used to program an end-effector equipped with a drill bit.
Researcher on the REINER project David Alatorre says, “The tool uses the point cloud supplied from the probe to generate a trajectory which the drill bit can then follow to mill the defect layer-by-layer, smoothing the edges so it does not introduce stress points were cracks could develop.
“This process normally takes days, but with REINER it can take just a few hours.”
The instrument-tool hybrid was recently successfully tested in use with a real engine at Rolls-Royce’s headquarters in Derby using a combination of 3G mobile networks and wifi.
Large or small Snake arms
The smallest snake arm developed at the UTC is 6mm wide and 175mm long and is formed of off-the-shelf motors and electronics. All of the control software it uses was developed inhouse. The latest research with this smaller snake-arm is looking at how it can be deployed to the last stage of a high-pressure compressor in an engine with tools attached to it, so it can mill or use a laser probe to remove materials.
Researcher Jorge Barrientos says, “Three cables enable the robot to move in different directions, creating 10 degrees of freedom. Modelling the arms has been very challenging because it is hard to get sensors inside it to get data – accessing the places that we want to inside the engine is tricky.”
Another snake-arm project is placing a 200mm snake arm on the end of a 5m cable and using an automated feeding mechanism guided by a camera on the front. The tip of the arm moves with six degrees of freedom and delivers a laser ablation tool via a mirror mounted on the tip, which can be positioned to direct the laser. The tool could also deliver air or water via a jet. The cable would fed through an engine to carry out inspections and repairs.
The 5m cable complicates the control of the arm and any effector considerably. Alatorre says, “The cable is stretchy and you need to understand how it moves and how that affects the arm. The longer the cable is, the more friction is created, while bends and kinks affect the level of force that is required to move the arm. The aim is to develop a closed loop feedback mechanism, so an operator can easily use it.”
In-situ repairs
Another recent project that has deployed a larger snake-arm for aerospace engine inspection and repairs is FLARE (Flame Spray Adder for in-situ Patch Repair of Aero-Engine combustors). This £1.5 million (US$1.8 million) Innovate UK-funded project uses two snake-arms, one to collect visual data about a defect and to act as the igniter for the coating spray and another to spray the thermobaric coating. The robot can be used to coat cracks inside a jet engine, for example in the combustion chamber, preventing bigger problems and costlier maintenance in the future.
One arm is first deployed to detect any damage, the second is deployed by the operator only if damage is found. All control is conducted locally. The temperature while the coating is being deployed can rise to as much as 3000˚C. “The coating has to be sprayed at the right distance,” says researcher on the project Abdelkhalick Mohammad. “It’s a difficult process and this is the first time such a coating has been deployed inside an engine. Performing this repair while the engine is on the wing saves a tremendous amount of time – an entire day of work potentially down to a couple of hours.”
FLARE was recently successfully demonstrated on the combustor of a Trent 900 and deployed on a Trent 1000 engine, using 3D imaging to develop control and navigation for the snake-arm. The robot is close to use in the field, with a company ready to commercialize the technology and in talks with the UTC.

In-situ inspection
Another project is producing an integral boroscope that can be retrofitted to engines to automatically detect and repair damage to turbine blades, so that the lifetime of the blades is significantly elongated.
The number of routine gas turbine inspections having to be performed is increasing as aviation-use grows. These inspections are time intensive, can vary between inspectors, and offer limited data capture and assessment possibilities. The Inspect project is developing an inspection system that mounts permanently onto an engine’s port and automatically extends downwards to examine compressor blades for damage after every flight an aircraft makes.
Researcher on the project, Andres Gameros Madrigal, says, “At the moment we have a minimal number of inspections to gather data. If we looked at every stop, we can gather better information to analyze damage, improve designs and maintenance schedules.”
Of the several challenges to overcome so that regular automatic deployment of the system can be achieved, the temperatures of up to 500˚C which are found within jet engines that the device has to operate in, is perhaps the most difficult.
The first version of the system uses fiber optic strands to create a flexible probe. The thickness of the walls has to be minimal to accommodate as many optical strands as possible to guarantee image quality. At the same time the wall thickness has to be sufficiently thick to withstand the high temperatures. A 3D-printed material with a lattice microstructure through which a refrigerant is used to chill the instrument was used for the walls of the probe.
However, to improve the resolution of the image and detect damage to turbine blades as early as possible, the second version of the probe is using glass optics. Gameros Mardigal says, “Now we are attempting to develop an endoscope which uses glass lenses able to survive a flight environment. What makes it really tough is that as the endoscope deploys it extends, changing the focus.”
The “actuated CCTV concept” uses a complex system of lenses above the deployable part of the endoscope to compensate as it deploys. These lenses are controlled by integral electronics.
In addition to the small size of the endoscope, the materials and operating environment, the complex optics and control software, the project will also see artificial intelligence algorithms developed to automatically detect defects in the turbine blades.
Walking hexapod
If the Inspect research project is the most technically complex, the most overtly futuristic-looking project at the UTC is the walking hexapod, which combines the snake arm with a walking robot. The robot is the evolution of a portable-machine-tool concept originally developed several years ago.

The original hexapod consists of a fixed platform with six legs that attaches to the surface you want to machine using electromagnets. Once attached, calibration takes around 10 minutes and is achieved via three sensors in three of the legs. This process gives the machine knowledge of the geometry of the surface it is working on.
Originally developed to carry our repairs on submarines, some drawbacks became apparent when it was used. Researcher Matteo Russo says, “A person has to be at the location and the sensors it used couldn’t provide information about its position and orientation.”
The second-generation hexapod sought to solve these problems and introduced locomotion to the legs. The WalkingHex uses magnetic feet, motors and a vision system to move. It also incorporates a version of the snake arm robot on top which coils and uncoils around a housing and can be remotely deployed. With the deployable machine tool situated underneath the main body of the robot, the device is a multi-functional walking machine tool that looks like a robot from a video game.
Researcher on the project, Jose Camacho says, “With this latest version we found that the workspace under the robot between its legs was too small. For the third version we are modifying the position of the upper joints to optimize the size of the workspace and performance.”
The third-generation hexapod being developed now represents five years of prototyping. Researchers are focused on developing and testing different systems for the robot’s legs. A particularly innovative approach, developed by researcher Nan Ma and undergoing testing, uses a single motor and wire to adjust the position of the legs at the base inwards and outwards to adjust the span of the working space underneath it.
These projects are typical of the automated and remotely-operated robotic inspection and repair technologies being developed at the Manufacturing and On-wing Technology UTC. Axinte says, “What we like is that Rolls-Royce approach us with interesting problems that require creative solutions.”
“We have such amazing and diverse talent here, expert designers, experts in materials, plasma physics, mechatronics, brilliant control engineers. They are solving incredibly complex problems and will go on to do great things in industry and academia.”


